
|
§ 5. Векторы
ADO в Delphi AJAX Android C++ CakePHP CMS COM CSS Delphi Flash Flex HTML Internet Java JavaScript MySQL PHP RIA SCORM Silverlight SQL UML XML Бази даних Веб-розробка Генетичні алгоритми ГІС Гітара Дизайн Економіка Інтелектуальні СДН Колір Масаж Математика Медицина Музика Нечітка логіка ООП Патерни Подання знань Розкрутка сайту, SEO САПР Сесії в PHP Системне програмування Системний аналіз Тестологія Тестування ПЗ Фреймворки Штучний інтелект
|
§ 5. ВекторыКлючові поняття: Скалярные величины, Вектор, Противоположный вектор, Длина (модуль) вектора, Нулевой вектор, Единичный вектор, Орт вектора, Коллинеарные векторы, Равные (свободные) векторы, Компланарные векторы, Линейные операции над векторами, Сумма векторов, Правило треугольника, Правило параллелограмма, Разность векторов, Произведение вектора на число, Свойства произведения векторов, Свойства линейных операций над векторами, Проекция точки на ось, Проекция вектора на ось, Свойства проекций, Следствия из свойств проекций, Разложение вектора по ортам координатных осей, Модуль вектора, Направляющие косинусы вектора, Линейные операции над проекциями векторов.
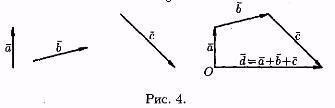
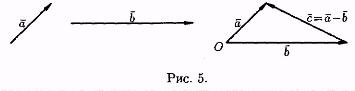
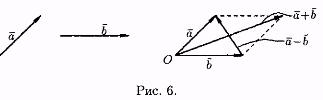
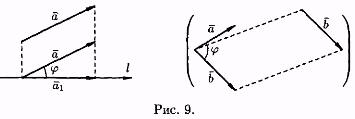
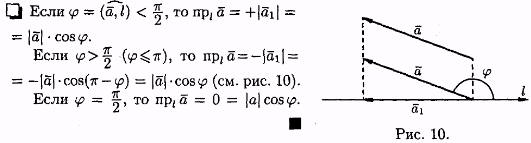
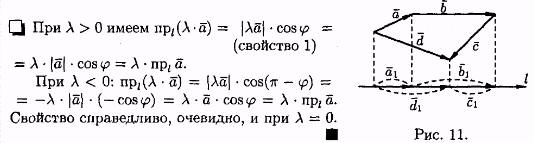
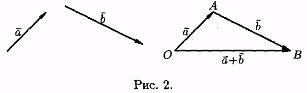
Величины, которые полностью определяются своим численным значением, называются скалярными. Примерами скалярных величин являются: площадь, длина, объем, температура, работа, масса. Другие величины, например сила, скорость, ускорение, определяются не только своим числовым значением, но и направлением. Такие величины называют векторными. Векторная величина геометрически изображается с помощью вектора. Вектор - это направленный прямолинейный отрезок, т. е. отрезок, имеющий определенную длину и определенное направление. Если А — начало вектора, а В - его конец, то вектор обозначается символом АВ или а. Вектор ВА (у него начало в точке В, а конец в точке A ) называется противоположным вектору АВ . Вектор, противоположный вектору а , обозначается -а . Длиной или модулем вектора АВ называется длина отрезка и обозначается |АВ|. Вектор, длина которого равна нулю, называется нулевым вектором и обозначается 0 . Нулевой вектор направления не имеет. Вектор, длина которого равна единице, называется единичным вектором и обозначается через e . Единичный вектор, направление которого совпадает с направлением вектора a , называется ортом вектора a и обо значается a °. Векторы а и b называются коллинеарными, если они лежат на одной прямой или на параллельных прямых; записывают a ||b . Коллинеарные векторы могут быть направлены одинаково или противоположно. Нулевой вектор считается коллинеарным любому вектору. Два вектор а и b называются равными (а = b ), если они коллинеарны, одинаково направлены и имеют одинаковые длины. Из определения равенства векторов следует, что вектор можно переносить параллельно самому себе, а начало вектора помещать в любую точку О пространства. На рисунке 1 векторы образуют прямоугольник. Справедливо равенство b =d , но а¹ с. Векторы а и с — противоположные, а =-с. Равные векторы называют также свободными. Три вектора в пространстве называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях. Если среди трех векторов хотя бы один нулевой или два любые коллинеарны, то такие векторы компланарны 5.2. Линейные операции над векторами Под линейными операциями над векторами понимают операции сложения и вычитания векторов, а также умножение вектора на число. Пусть а и b — два произвольных вектора. Возьмем произвольную точку О и построим вектор ОА=а. От точки А отложим вектор АВ = b . Вектор ОВ, соединяющий начало первого вектора с концом второго, называется суммой векторов а и b : О B=а+b (см. рис. 2) Это правило сложения векторов называют правилом треугольника. Сумму двух векторов можно построить также по правилу параллелoграмма (см. рис. 3). На рисунке 4 показано сложение трех векторов а, b и с. Под разностью векторов а и b понимается вектор с=а-b такой, что b+с=а (см. рис. 5). Отметим, что в параллелограмме, построенном на векторах а и b одна направленная диагональ является суммой векторов а и b , а другая — разностью (см. рис. 6). Можно вычитать векторы по правилу: а - b = а + (-b ), т. е. вычитание векторов заменить сложением вектора а с вектором, противоположным вектору b . Произведением вектора а на скаляр (число) λ называется вектор λ*а (или а*λ), который имеет длину |λ|*|а|, коллинеарен вектору а, имеет направление вектора а, если λ>0 и противоположное направление, если λ<0. Из определения произведения вектора на число следуют свойства этого произведения: 1) если b=λ * а , то b || а . Наоборот, если b ||а , (а¹0 ), то при некотором λ верно равенство b = λа ; 2) всегда а =|а | • а -о , т. е. каждый вектор равен произведению его мо дуля на орт. Линейные операции над векторами обладают следующими свойствами: 1. а+b=b+а Эти свойства позволяют проводить преобразования в линейных операциях с вектором так, как это делается в обычной алгебре: слагаемые менять местами, вводить скобки, группировать, выносить за скобки как скалярные, так и векторные общие множители. 5.3. Проекция вектора на ось Пусть в пространстве задана ось l, т. е. направленная прямая. Проекцией точки М на ось l называется основание М1 перпендикуляра ММ1, опущенного из точки на ось. Точка М1 есть точка пересечения оси l с плоскостью, проходящей через точку М перпендикулярно оси (см. рис. 7). Если точка М лежит на оси l, то проекция точки М на ось совпадает с М1. Пусть АВ — произвольный вектор (АВ¹ 0). Обозначим через А1 и b 1проекции на ось l соответственно начала А и конца В вектора АВ и рассмотрим вектор А1В1 Проекцией вектора АВ на ось l называет ся положительное число |A 1B 1 | , если вектор А 1В 1 и ось l одинаково направлены и отрица тельное число — |A 1B 1 | , если вектор А 1В1 и ось l противоположно направлены (см. рис. 8). Если точки a 1и b 1совпадают (А 1В 1 =0), то проекция вектора АВ равна 0. Проекция вектора АВ на ось l обозначается так: прlАВ. Если АВ=0 или АВ^l , то прl АВ=0. Угол j между вектором а и осью l (или угол между двумя векторами) изображен на рисунке 9. Очевидно,0£j£p Рассмотрим некоторые основные свойства проекций. Свойство 1. Проекция вектора a на ось l равна произведению модуля вектора a на косинус угла j между вектором и осью, т. е. прla =|a |•cos j . Следствие 5.1. Проекция вектора на ось положительна (отрицательна), если вектор образует с осью острый (тупой) угол, и равна нулю, если этот угол — прямой. Следствие 5.2. Проекции равных векторов на одну и ту же ось равны между собой. Свойство 2. Проекция суммы нескольких векторов на одну и ту же ось равна сумме их проекций на эту ось Свойство 3. При умножении вектора а на число А его проекция на ось также умножается на это число, т. е. Таким образом, линейные операции над векторами приводят к соответствующим линейным операциям над проекциями этих векторов. 5.4. Разложение вектора по
ортам координатных осей. Рассмотрим в пространстве прямоугольную систему координат Oxyz. Выделим на координатных осях Ох, Оу и Oz единичные векторы (орты), обозначаемые i , j , k соответственно (см. рис. 12). Выберем произвольный вектор а пространства и совместим его начало с началом координат: а=ОМ. Найдем проекции вектора а на координатные оси. Проведем через конец вектора ОМ плоскости, параллельные координатным плоскостям. Точки пересечения этих плоскостей с осями обозначим соответственно через М1 , М2 и Мз.Получим прямоугольный параллелепипед, одной из диагоналей которого является вектор ОМ. Тогда пр ха=|OM 1|, npya = |ОМ2|, прz а=|ОМз|. По определению суммы нескольких векторов находим а = ОМ 1 + M1N + NM. А так как M 1N=OM 2 , NM =ОМз, то Обозначим проекции вектора а=ОМ на оси Ох, Оу и Oz соответственно через ах, ау и az, т.е. |OM 1| = ах,|ОМ2| = ау, |ОМ3| = аz. Тогда из равенств (5.1) и (5.2) получаем Эта формула является основной в векторном исчислении и называется разложением вектора по ортам координатных осей. Числа ах, ау, az называются координатами вектора а, т. е. координаты вектора есть его проекции на соответствующие координатные оси. Векторное равенство (5.3) часто записывают в символическом виде: a = (ax ;ay ;az). Равенство b = (bx ;by ; bz ) означает, что b = b х•i +b у • j + bz • k . Зная проекции вектора а, можно легко найти выражение для модуля вектора. На основании теоремы о длине диагонали прямоугольного параллелепипеда можно написать Отсюда т. е. модуль вектора равен квадратному корню из суммы квадратов его проекций на оси координат. Пусть углы вектора а с осями Ох, Оу и Oz соответственно равны a,b,g. По свойству проекции вектора на ось, имеем Числа
Подставим выражения (5.5) в равенство (5.4), получаем Сократив на т. е. сумма квадратов направляющих косинусов ненулевого вектора равна единице. Легко заметить, что координатами единичного вектора e
являются числа Итак, задав координаты вектора, всегда можно определить его модуль и направление, т.е. сам вектор. 5.5. Действия над векторами, заданными проекциями Пусть векторы а=(ax; ay; az) и b=( bx; by; bz) заданы своими проекциями на оси координат Ox,Oy,Oz или, что то же самое а = ах •i + ау • j +аz • k, b =bх • i + bу • j + bz • k. Линейные операции над векторами Так как линейные операции над векторами сводятся к соответствующим линейным операциям над проекциями этих векторов, то можно записать: 1. а ± b = (ах ±bх)i + (ау ±by)j + ( az ± bz)k, или кратко а ± b = (ах ±bx; ay± by; az ± bz). To есть при сложении (вычитании) векторових одноименные координаты складываются (вычитаются). 2. l а = l ах • i + l ау • j + l az • k или короче l а = (lах; lау; lаz). То есть при умножении вектора на скаляр координаты вектора умножаются на этот скаляр. Из определения вектора как направленного отрезка, который можно передвигать в пространстве параллельно самому себе, следует, что два вектора а и b равны тогда и только тогда, когда выполняются равенства: aх= bх; ау=by; az= bz , т. е. Выясним условия коллинеарности векторов а и b, заданных своими координатами. Так как а || b, то можно записать а = l • b, где l-некоторое число. То есть Таким образом, проекции коллинеарных векторов пропорциональны. Верно и обратное утверждение: векторы, имеющие пропорциональные координаты, коллинеарны. Пусть в пространстве задана прямоугольная декартова система координат Oxyz. Для любой точки М координаты вектора ОМ называются координатами точки М. Вектор ОМ называется радиус-вектором точки М, обозначается r , т. е. ОМ= r . Следовательно, координаты точки — это координаты ее радиус-вектора Координаты точки М записываются в виде М(х; у; z ). Координаты вектора Найдем координаты вектора а = АВ, если известны координаты точек A( x1; y1; z1) и В( x2;у2; z2). Имеем (см. рис. 13):
Следовательно, координаты вектора равны разностям соответствующих координат его конца и начала: АВ = (х2-х1;у2-у1; z2- z1). Зверніть увагу на додаткові посиланняЯкщо вас цікавить...Головний розділСторінки, близькі за змістомзагрузка...
|
Сторінки, близькі за змістом
|
|
Copyright © 2008—2026 Портал Знань.
При використанні матеріалів посилання, для інтернет-ресурсів — гіперпосилання, на Znannya.org обов'язкове.
Зв'язок
|
НТУУ "КПІ" Інженерія програмного забезпечення КПІ Лабораторія СЕТ |
|
 Вища математика
Вища математика Математика
Математика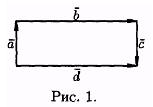







 .
.  ..
.. 
